Hitsausrobottisarja


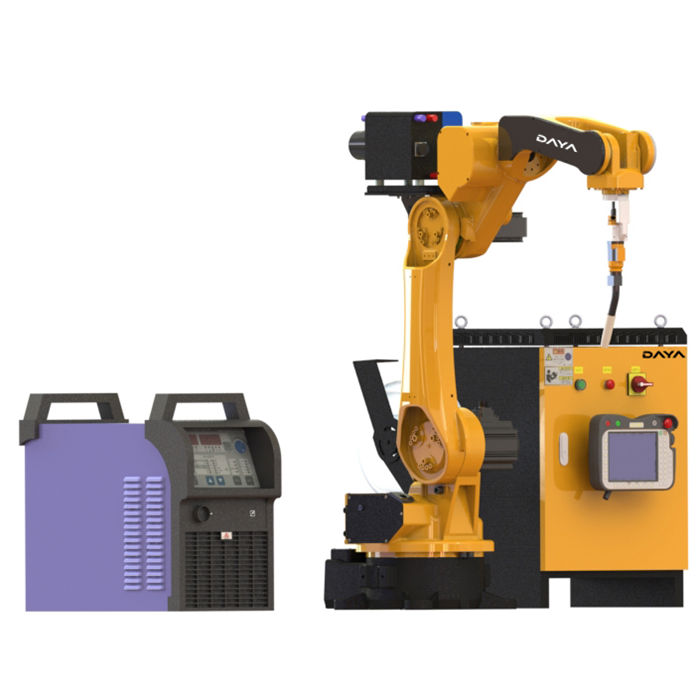

Hitsausrobotti

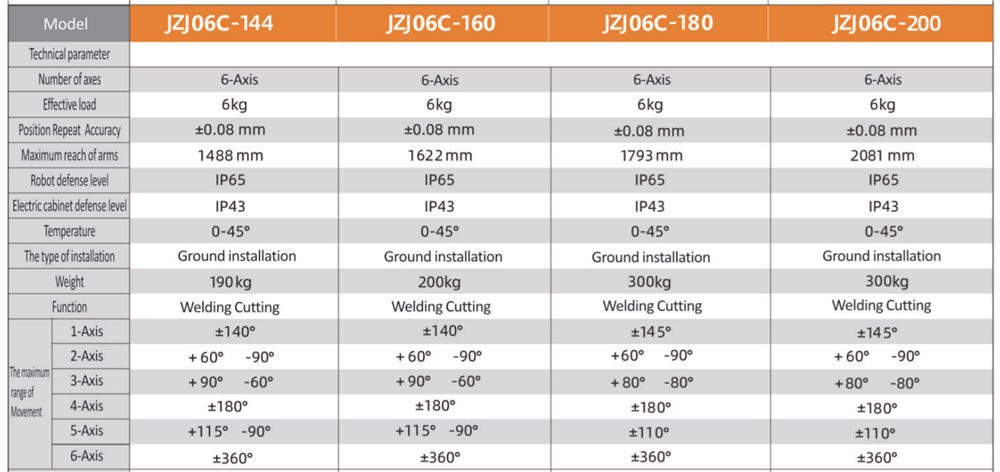
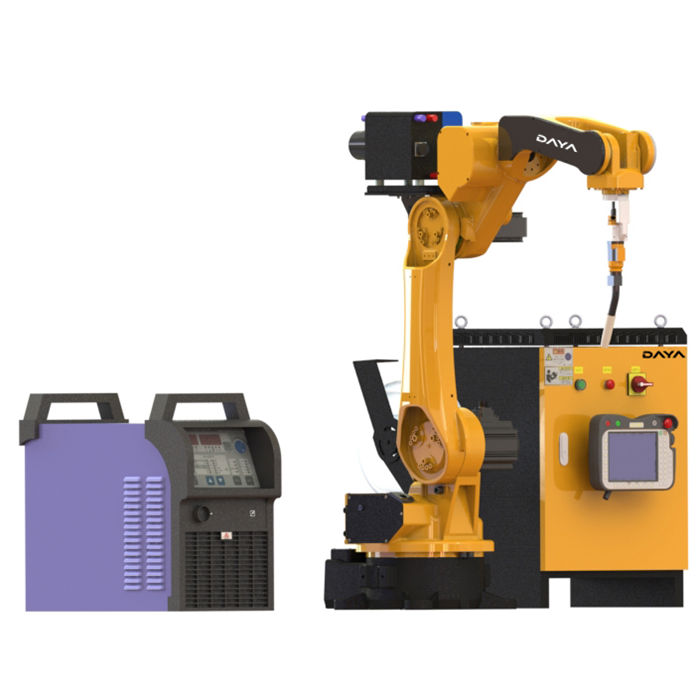
Hitsausrobottisarja JZJ06C-180
Hitsausrobottisarja JZJ06C-144

Hitsausrobottisarja JZJ06C-160

Hitsausrobottisarja JZJ06C-200
Lyhyt johdanto
Hitsausrobotti on teollisuusrobotti, joka harjoittaa hitsausta (mukaan lukien leikkaus ja ruiskutus). Kansainvälisen standardointijärjestön (ISO) määritelmän mukaan teollisuusrobotti kuuluu tavalliseen hitsausrobottiin, teollisuusrobotti on monikäyttöinen, toistettava ohjelmoitava manipulaattori, jossa on vähintään kolme ohjelmoitavaa akselia ja jota käytetään teollisuusautomaation alalla. Eri sovelluksiin sopeutumiseksi robotin viimeisen akselin mekaaninen rajapinta on yleensä liitoslaippa, joka voidaan liittää erilaisiin työkaluihin tai päätyeforeihin. Hitsausrobotti on asentaa hitsauspihdit tai hitsaus (leikkaus) pistooli teollisuusrobotin pääakselin laippaan, jotta se voi suorittaa hitsauksen, leikkauksen tai lämpösuihkutuksen.
Robottihitsaus on koneellisten ohjelmoitavien työkalujen (robottien) käyttö, jotka automatisoivat hitsausprosessin täysin suorittamalla hitsin ja käsittelemällä osaa. Prosessit, kuten kaasumetallikaarihitsaus, ovat usein automatisoituja, mutta eivät välttämättä vastaa robottihitsausta, koska ihmisen käyttäjä valmistaa joskus hitsattavat materiaalit. Robottihitsausta käytetään yleisesti vastuspistehitsauksessa ja kaarihitsauksessa korkean tuotannon sovelluksissa, kuten autoteollisuudessa.
Robottihitsaus on suhteellisen uusi robotiikan sovellus, vaikka robotit otettiin ensimmäisen kerran käyttöön Yhdysvaltain teollisuudessa 1960-luvulla. Robottien käyttö hitsauksessa alkoi vasta 1980-luvulla, jolloin autoteollisuus alkoi käyttää robotteja laajasti pistehitsaukseen. Siitä lähtien sekä teollisuudessa käytettyjen robottien että niiden sovellusten määrä on kasvanut huomattavasti. Vuonna 2005 Pohjois-Amerikan teollisuudessa oli käytössä yli 120 000 robottia, joista noin puolet hitsaukseen. [1] Kasvua rajoittavat ensisijaisesti korkeat laitekustannukset ja siitä johtuva rajoittaminen korkean tuotannon sovelluksiin.
Robottikaarihitsaus on alkanut kasvaa nopeasti vasta äskettäin, ja se ohjaa jo noin 20% teollisuusrobottisovelluksista. Kaarihitsausrobottien pääkomponentit ovat manipulaattori tai mekaaninen yksikkö ja ohjain, joka toimii robotin "aivoina". Manipulaattori saa robotin liikkumaan, ja näiden järjestelmien suunnittelu voidaan luokitella useisiin yleisiin tyyppeihin, kuten SCARA ja suorakulmainen koordinaattirobotti, jotka käyttävät erilaisia koordinaattijärjestelmiä koneen käsivarsien ohjaamiseen.
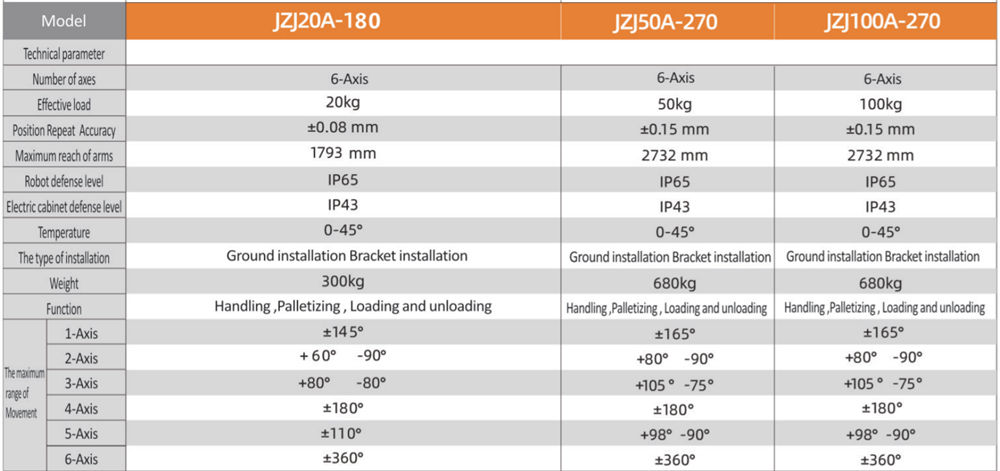
Hitsausrobotti-sarjan tekniset parametrit